Quick Answer: The Roomba J7+ cliff sensor error usually stems from dirty optical sensors on the unit's underside — four small windows that detect drop-offs. Clean them with a dry microfiber cloth or a cotton swab lightly dampened with isopropyl alcohol, then perform a factory reset by holding the CLEAN button for 20 seconds. Most errors clear within minutes, much like troubleshooting a flickering display if you follow a guide like Is Your LG OLED Flickering? How to Identify and Fix Screen Issues.
Let me tell you what actually happens when a Roomba J7+ starts refusing to move. You pick it up, flip it over, and the undercarriage looks fine to you — no giant clumps of debris, wheels spin, brushroll turns. You put it back down, hit Clean, and within about 8 seconds it stops dead and throws the cliff sensor error. Solid red ring, maybe a few blinks, the iRobot Home app says something vague about "cliff sensors detected." You restart it. Same thing. You restart it again. Same thing.
This is one of those failures that looks deceptively simple from the outside and turns out to be as frustrating as encountering a Bosch Dishwasher E15 Error when you just want to run a cycle. Not catastrophically broken — but it'll eat 45 minutes of your Saturday if you don't know the specific operational chain behind what's going wrong.
Here's what's actually happening inside the machine, and why the official iRobot support documentation leaves out about half the relevant information.
How the J7+ Cliff Detection System Actually Works — Optical Sensor Architecture and IR Emitter Logic
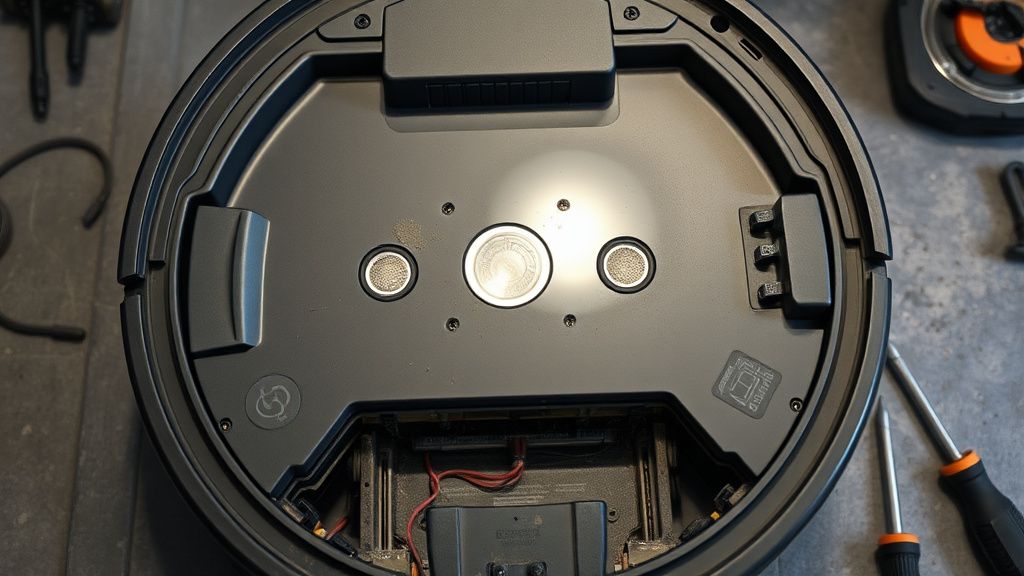
The J7+ runs four cliff sensors positioned at the front-left, front-right, and two toward the rear undercarriage. Each sensor is an infrared emitter-receiver pair. The emitter shoots a pulse of IR light downward at roughly a 45-degree angle toward the floor. The receiver measures the reflected signal. When the reflection drops below a threshold — because there's a drop-off, a dark surface, or the sensor window is fouled — the robot's firmware interprets that as a cliff and cuts motor power.
That's the basic loop. But the actual behavior is more nuanced and more frustrating.
The J7 platform introduced a new probabilistic navigation layer, though it remains prone to sensor-related quirks, similar to how Dreame L20 Ultra Error 14 can impact robotic navigation. The firmware doesn't just halt on a single sensor trigger — it runs a confidence weighting across all four sensors plus its camera-based obstacle recognition system. Which sounds sophisticated. In practice, what this means is that a partially dirty sensor can create intermittent errors that are maddeningly hard to reproduce in a controlled way. You'll clean the sensors, run it successfully twice, and then on the third run it errors out again on the same spot of your floor.
The IR emitter windows themselves — those small, slightly recessed rectangular or oval windows on the undercarriage — accumulate a specific kind of fouling that's different from general dust. Fine particulate from carpets, pet dander, and most critically, waxy residue from floor polishing products or cleaning sprays, creates a semi-transparent film that doesn't look dirty to the naked eye but scatters IR light enough to confuse the receiver. This is the failure mode that catches most people off guard. The sensors look clean. They're not clean. Not optically.
The second failure mode is physical: the sensor windows can crack or develop micro-scratches from grit being dragged across them during normal operation. A scratched window diffuses the IR beam unpredictably. There's no fix for that short of sensor replacement.
Third failure mode, and this one shows up constantly in r/roomba threads: dark flooring. The J7+ cliff detection system has a well-documented sensitivity problem with surfaces that are dark brown, near-black, very deep charcoal — basically anything with very low IR reflectance. The floor reflects so little IR that the sensor registers it as a drop-off even when it isn't. iRobot has acknowledged this limitation in various support documents over the years, similar to how manufacturers provide specific troubleshooting steps for other smart devices, such as fixing an Oura Ring Gen 4 Not Syncing issue.ones in the app, which is a workaround, not a solution.
Diagnosing the Error Before You Touch Anything — Don't Skip This Step
Before you start cleaning or resetting, spend three minutes diagnosing which failure mode you're dealing with. This will save you from chasing the wrong problem.
Step 1: Check the floor surface where it errors
Does the error happen consistently in one location, or is it random across your floor? If it's location-specific and that location has dark flooring, rugs with dark patterns, or a transition strip between surfaces, you're likely dealing with a false-positive cliff detection from low IR reflectance. Cleaning the sensors might help slightly, but the core issue is environmental.
Step 2: Inspect the sensor windows under good light
Pick up the robot, flip it, and use your phone flashlight at a low angle across the sensor windows. Look for:
- Film or haze (wax, cleaning product residue)
- Grit or debris packed into the recessed window edges
- Visible scratches
- Any sensor window that looks physically damaged or discolored
Step 3: Check the error pattern
A single blink pattern versus multiple blinks tells you different things. On the J7+ platform, the LED ring behavior during a cliff error is typically a solid red ring with the robot stating "Please pick me up and move me to a new location." If you're seeing this combined with immediate re-triggering within a second of being placed back down, that's almost certainly a dirty or damaged sensor rather than actual cliff detection.
Step 4: Look at the iRobot Home app error log
The app logs cliff sensor events. If you see repeated cliff sensor triggers in the same session with no movement between triggers, that confirms the sensor isn't clearing between reads — classic dirty or failing sensor behavior.
The Actual Cleaning Procedure — What Works and What Doesn't
The iRobot official guidance says "wipe the sensors with a clean dry cloth." This is technically correct and also nearly useless for anything beyond fresh surface dust. Here's the field-tested procedure.
Tools you need
- Dry microfiber cloth (lint-free)
- Cotton swabs (the non-fluffing type — generic pharmacy swabs are fine)
- 90% or higher isopropyl alcohol (IPA)
- Compressed air canister
- A well-lit workspace and your phone's flashlight
Cleaning sequence
1. Blow out the recessed sensor cavities first
Before touching anything, use compressed air to blast out any loose particulate from around the sensor windows. Don't use your mouth — the moisture will cause more problems. Hold the can upright, use short bursts, and angle them into the recessed edges around each window. You'll often see a visible cloud of fine debris come out.
2. Dry wipe with microfiber
Using a corner of a dry microfiber cloth, wipe each sensor window with a gentle circular motion. Don't press hard. The windows are recessed, so you need to angle the cloth to actually contact the glass.
3. IPA wipe for film/residue
Dampen a cotton swab with IPA — damp, not saturated, you don't want liquid running into the sensor cavity. Wipe each window with a fresh swab. Let it sit for 30 seconds before proceeding. The IPA dissolves waxy residue that dry wiping won't touch. This is the step that actually clears the error for most users dealing with film contamination.
4. Final dry wipe
Go back over each window with a fresh dry cotton swab to remove any IPA residue. Then microfiber again.
5. Inspect under flashlight
Before you put the robot down, check each window again at a low angle under your phone flashlight. A clean sensor window should look clear, not hazy. If any window still shows a film, repeat the IPA step.

The Reset Procedure — When Cleaning Alone Doesn't Clear It
Cleaning the sensors fixes the physical cause. But the J7+'s firmware can get itself into a state where it continues throwing the cliff sensor error even after the sensors are physically clean. This happens because the error state gets written to a memory buffer that doesn't automatically clear on restart. You need to force a full reset.
Soft Reset (Start Here)
Press and hold the CLEAN button for approximately 10 seconds until the light ring spins and the robot restarts. This clears the active error state but doesn't reset operating parameters.
Factory Reset via the Robot
Press and hold the CLEAN button for 20 seconds. The light ring will flash and the robot will play a tone sequence. This wipes the robot's map data, scheduled runs, and firmware-cached error states. Note: you'll need to re-pair the robot in the iRobot Home app and remap your home.
Field note from r/roomba: Multiple users have reported (thread: "J7 cliff sensor error won't clear even with clean sensors," posted late 2022 and still getting replies) that the factory reset is necessary when the error persists post-cleaning, especially if the robot previously ran into an actual drop-off — like falling down stairs. The firmware appears to lock into a heightened sensitivity state after a genuine cliff event, presumably as a protective behavior, but it doesn't automatically relax back to normal thresholds. Factory reset clears that.
Reset via iRobot Home App
If you prefer not to do a physical factory reset:
- Open iRobot Home app
- Navigate to Settings → Robot Settings → Factory Reset
- Confirm the reset
- Re-add the robot to your Wi-Fi and rebuild the smart map
The app-based reset is functionally identical to the physical button method. Use whichever is more convenient.
Dark Floor Problem — The Chronic Failure Mode Nobody Likes to Admit
This deserves its own section because it's the most common cause of ongoing, unresolvable cliff sensor errors on the J7+ platform and iRobot's handling of it has been, charitably, underwhelming.
The problem is architectural. The IR-based cliff detection system was designed around typical flooring reflectance values. Dark hardwood, dark tile, and especially certain matte-finish luxury vinyl planks in very dark tones have reflectance values low enough that even clean, fully functional sensors register them as potential drop-offs.
The iRobot response to this, when you dig through their support pages and forum responses from iRobot reps, has consistently been:
- Use the iRobot Home app to draw keep-out zones around problematic areas
- Set the robot to avoid the specific room
- Place a light-colored rug or mat in the transition area
These are product workarounds for a hardware limitation. They function, but they mean you're buying a $650+ robot vacuum that can't clean part of your floor.
There have been firmware updates over the J7+ lifecycle that claimed to improve "dark surface navigation," and anecdotally some users on dark floors have noticed improved behavior after certain updates. But there is no official public documentation of the specific IR threshold changes made in those updates, and the dark floor false-positive problem has not been eliminated.
The deeper problem is that a software-based fix is limited by the hardware's physical capability. If the floor genuinely reflects too little IR for the sensor to distinguish from open air, no firmware update can conjure reflected signal that isn't there. At that point you either need a different sensor technology — structured light, time-of-flight lidar — or you need to change the floor.
Real Field Reports — When the "Simple Fix" Isn't
Case 1: The wax buildup scenario
A user on the iRobot Community Forums (thread titled "J7+ stopped mid-run cliff error on hardwood") reported that after refinishing their hardwood floors with a water-based polyurethane and then using a Bona maintenance product regularly, their J7+ began throwing cliff sensor errors on specific sections of the floor — exactly the areas where they were most consistent about floor maintenance. The Bona product was depositing an extremely thin waxy film on the sensor windows over repeated runs. The standard dry-wipe cleaning didn't resolve it. IPA cleaning did, but the problem returned within a few weeks of resumed operation. Their eventual solution was switching to a plain water mop for maintenance cleaning in those areas.
Case 2: The "sensor looks fine, keeps erroring" firmware trap
Multiple Reddit reports (r/roomba, 2022-2023) describe a scenario where the J7+ throws cliff sensor errors after returning to base from a successful run, then fails to start the next run. The sensors are clean, the floor is normal hardwood or light carpet. The error appears to be a firmware state persistence issue — the robot is not actually seeing a cliff, but the error state from a previous event hasn't cleared. Factory reset resolves this consistently in these reports. It should not require a factory reset. This is a firmware bug that iRobot has not explicitly acknowledged in any public release note.
Case 3: The cracked sensor window
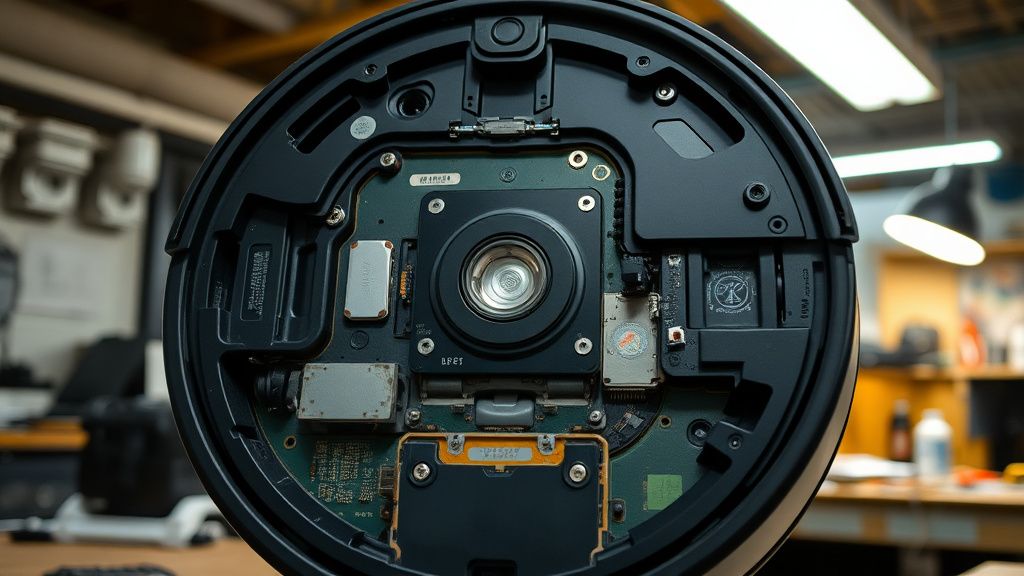
This one comes up less frequently but is worth knowing about. Users running the robot in areas with gritty debris — a mudroom, a workshop area — report that over 12-18 months, the cliff sensor windows develop micro-abrasions from grit particles being dragged across them during normal operation. The windows are small and the scratches aren't always visible without magnification. A scratched window causes persistent, cleaning-resistant cliff sensor errors. The fix is sensor replacement — either through iRobot's service program, or third-party replacement sensors sourced from parts suppliers. The sensor modules on the J7 platform are soldered in, not hot-swap, so this is not a DIY repair for most users.
Counter-Criticism and Debate — Is the J7+ Cliff Sensor System Actually Good?
There's a genuine split in the robotics community and among experienced users about whether the J7+ represents meaningful cliff sensor progress or whether iRobot simply moved the problem around.
The defense of the J7+ approach:
The J7 platform added camera-based obstacle detection (the iRobot "Genius" vision system) partly to supplement and sanity-check the cliff sensor data. In theory, the camera provides a second data source that should reduce false-positive cliff errors by cross-referencing visual data. iRobot's engineering rationale — stated in their marketing materials — was that combining IR sensors with visual recognition creates a more robust system than either alone.
The critique:
The camera-based obstacle system was primarily marketed around avoiding pet waste and cables, not around improving cliff detection reliability. The actual integration between the camera's obstacle data and the cliff sensor decision logic is not publicly documented. Users on dark floors report no improvement from the camera integration for cliff false-positives — which is unsurprising, because a camera also struggles with low-contrast dark surfaces under certain lighting conditions.
Critics on Hacker News and r/roomba who've compared the J7+ behavior to the older 960/980 series (which lack the camera) often report that the newer platform feels more prone to cliff sensor paralysis in edge cases, not less. This is a qualitative observation, not a controlled test, but it's a consistent theme across multiple threads. The suspicion is that the probabilistic weighting system in the J7 firmware, while theoretically more sophisticated, creates more opportunities for the system to err on the side of caution — and "erring on the side of caution" means stopping unnecessarily.
The third position:
Several engineers commenting in iRobot's developer community forums (before iRobot's acquisition by Amazon and the subsequent changes to their community infrastructure) argued that the cliff sensor problem is fundamentally a hardware economics problem. High-quality time-of-flight sensors that would eliminate most false positives cost significantly more than the IR proximity sensors currently used. At the J7+'s price point, there's margin pressure. The sensor system is good enough for most floors. The users who experience persistent problems are on flooring that falls outside the design envelope. This is the unsatisfying but probably accurate explanation.
When to Consider Sensor Replacement or Service
If you've cleaned the sensors with IPA, done a factory reset, ruled out dark flooring as a cause, and the cliff sensor error persists, you're looking at a hardware failure.
Signs that point toward sensor replacement:
- Error is consistent, not intermittent, immediately after physical cleaning
- Error triggers within 1-2 seconds of being placed on any surface, regardless of floor color
- Visible physical damage to one or more sensor windows (cracks, discoloration)
- Robot behaves normally on a white or very light surface but errors on medium or dark surfaces even after cleaning — this suggests a sensor with reduced signal strength, not necessarily dirt
iRobot offers a service/replacement program. If the robot is within warranty, the cliff sensor failure is covered under defects. Out of warranty, you're looking at either their paid service, or third-party